Improving your convolution performance does not have to be difficult - one way to achieve this is by using grouped convolutions. By splitting the filter maps in your convolutional layers into multiple disjoint groups, it's possible to reduce the parameters in your network, while having the network learn better features.
How? That's what you will discover by reading today's article. Firstly, you will read about grouped convolutions, from a ResNeXt point of view. Then, you'll learn about why they can improve network and training performance. Finally, you will take a look at implementing these convolutions with TensorFlow and Keras.
Let's take a look! 😎
What are grouped convolutions?
In their paper introducing the ResNeXt architecture, Xie et al. (2017) noted that there are multiple ways of improving model performance. A relatively standard one is to make the model deeper - that is, for example, adding more convolutional layers to learn a deeper hierarchy of features that can be used for classification.
Making the neural network wider, by increasing the number of feature maps learned at every level, is another option, to increase feature richness benefiting optimization.
However, in their work, they state that there is another way: by increasing the cardinality
Experiments demonstrate that in- creasing cardinality is a more effective way of gaining accu- racy than going deeper or wider, especially when depth and width starts to give diminishing returns for existing models.
Xie et al. (2017)
Cardinality, here, is defined as "the size of the set of transformations". Because things may still be a bit vague now, let's make things visual for better understanding.
Starting from a simple residual block...
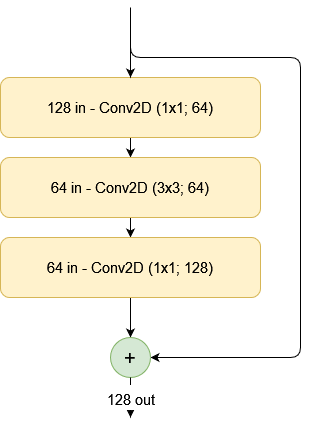
Suppose that you are training a convolutional architecture. To be more specific, you're using ResNet blocks as the backbone for your classifier. A simple residual block - with a regular mapping and a skip connection - can look as follows:
The creators of the ResNeXt architecture suggest that by splitting this set of transformations into multiple sub sets, performance can increase, because the sub sets become separate feature learners at a specific level in the feature hierarchy.
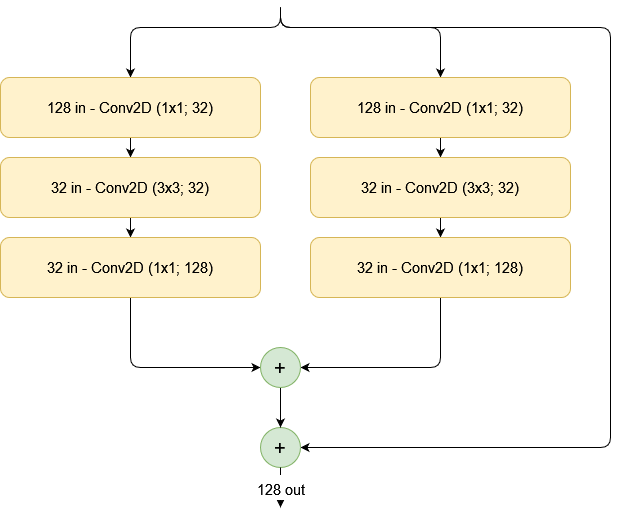
The number of sub sets at a specific level is the cardinality of that specific level. For example, if we split the residual block into sub sets with a cardinality of 2, this would be the outcome. We see a similarly complex model, where the outputs of both subsets are summated and then the skip connection is added back.
The ResNeXt authors have found empirical improvements of their architecture over classic ResNet. However, the split-transform-summate approach from above is not the only possible approach. For example, it is also possible to perform split-transform-concatenate, after which the concatenation is processed by another convolutional layer to preserve feature map dimensionaltiy of the whole block.
Using grouped convolutions
Now, getting to the point of this article, another approach is to use grouped convolutions. Having been at the basis of the deep learning revolution, it was already used by AlexNet in order to allow training in a multi-GPU setting.
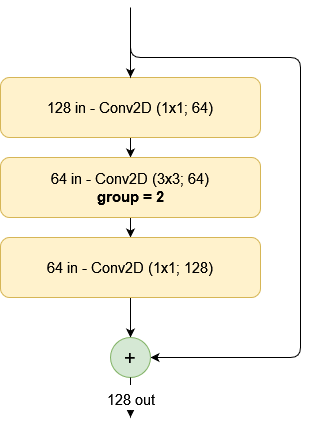
Now, what is a grouped convolution?
[A] group is convolved separately with filters / groups filters. The output is the concatenation of all the groups results along the channel axis.
TensorFlow (n.d.)
Normally, in a regular convolution, we have filters (which slide or convolve over the input feature maps). For example, we can have 32 filters that slide over the input feature maps. These 32 filters are convolved at the same time, over the whole input.
When using grouped convolutions, we can separate the filters into disjoint groups - i.e., groups of filters that convolve over distinct feature maps. For example, if we would split the 32 in 2 groups of 16 filters, the first group would convolve over the first 50% of input filters, while the second would convolve over the second 50%.
Note that the percentage is relative - let's illustrate this with another example. If we have 60 input feature maps, and 256 output feature maps, each group would convolve over 15 (25%) feature maps if we would use 4 groups.
Benefits of using grouped convolutions
Using grouped convolutions has multiple benefits compared to using normal convolutions:
- Hardware efficiency. By splitting the convolution procedure in disjoint groups, training can be parallelized over GPUs quite easily - for example, by using one GPU per group.
- Reduced number of trainable parameters. The wider one's convolutional layer, the more parameters are used. By using grouped convolutions, the number of parameters is reduced significantly.
- Better model performance! Now, that's something that is quite surprising (since splitting the convolution into groups would yield a model that is theoretically as complex as using regular convolutions). Ioannou (2017) discusses this in an interesting article - something that was underrecognized is that using grouped convolutions means learning better representations.
But why? Make sure to read the article if you want to learn it in more detail, but the gist of the argument is that grouped convolutions perform better representation learning because irrelevant correlations between features across layers are left out. For example, if you would have a regular convolution with 32 filters in one layer and 64 in the next, learning capacity of the network correlates the 32 with the 64 filters. This happens because the gradient update yielding a change in the 32 filters is dependent on the gradient update generated for the 64 filters more downstream. In other words, all correlations between the 64 and 32 layers mean something for network performance.
Using grouped convolution breaks down the filters into separate and disjoint groups. In other words, these groups do not know about each other when being trained. In sum, this means that (should we use grouped convolutions with 2 groups for each layer) now only 16 filters are correlated with 32 filters. Increasing the number of groups both reduces parameters and improves performance, by having actually many small networks into one.
Implementing grouped convolutions with TensorFlow 2 and Keras
Using grouped convolutions with TensorFlow 2 and Keras is actually really easy. The only thing that you will need to do is using the groups attribute in specifying your convolutional layer (whether that is a Conv1D, Conv2D or Conv3D layer).
A positive integer specifying the number of groups in which the input is split along the channel axis. Each group is convolved separately with filters / groups filters. The output is the concatenation of all the groups results along the channel axis. Input channels and filters must both be divisible by groups.
TensorFlow (n.d.)
For example, if you have a two-dimensional convolutional layer that outputs 64 feature maps, you can turn it into a grouped convolution that outputs 4x16 feature maps by simply specifying this in layer initialization:
Conv2D(64, (3, 3), groups=4)
That's it! You now understand what grouped convolutions are, why they can be useful and beneficial to your neural network, and how you can use them within TensorFlow 2 and Keras 😎 If you have any questions, comments or suggestions, feel free to leave a message in the comments section below 💬 I will then try to answer you as quickly as possible. For now, thank you for reading MachineCurve today and happy engineering!
References
Xie, S., Girshick, R., Dollár, P., Tu, Z., & He, K. (2017). Aggregated residual transformations for deep neural networks. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 1492-1500).
TensorFlow. (n.d.). Tf.keras.layers.Conv2D. https://www.tensorflow.org/api_docs/python/tf/keras/layers/Conv2D
Ioannou, Y. (2017, August 10). A tutorial on filter groups (Grouped convolution). A Shallow Blog about Deep Learning. https://blog.yani.ai/filter-group-tutorial/

Hi, I'm Chris!
I know a thing or two about AI and machine learning. Welcome to MachineCurve.com, where machine learning is explained in gentle terms.
Getting started
Foundation models
Learn how large language models and other foundation models are working and how you can train open source ones yourself.
Keras
Keras is a high-level API for TensorFlow. It is one of the most popular deep learning frameworks.
Machine learning theory
Read about the fundamentals of machine learning, deep learning and artificial intelligence.
Most recent articles
January 2, 2024
What is Retrieval-Augmented Generation?
December 27, 2023
In-Context Learning: what it is and how it works
December 22, 2023
CLIP: how it works, how it's trained and how to use it
Article tags
Most popular articles
February 18, 2020
How to use K-fold Cross Validation with TensorFlow 2 and Keras?
December 28, 2020
Introduction to Transformers in Machine Learning
December 27, 2021
StyleGAN, a step-by-step introduction
July 17, 2019
This Person Does Not Exist - how does it work?
October 26, 2020
Your First Machine Learning Project with TensorFlow 2.0 and Keras
Connect on social media
Connect with me on LinkedIn
To get in touch with me, please connect with me on LinkedIn. Make sure to write me a message saying hi!
Side info
The content on this website is written for educational purposes. In writing the articles, I have attempted to be as correct and precise as possible. Should you find any errors, please let me know by creating an issue or pull request in this GitHub repository.
All text on this website written by me is copyrighted and may not be used without prior permission. Creating citations using content from this website is allowed if a reference is added, including an URL reference to the referenced article.
If you have any questions or remarks, feel free to get in touch.
TensorFlow, the TensorFlow logo and any related marks are trademarks of Google Inc.
PyTorch, the PyTorch logo and any related marks are trademarks of The Linux Foundation.
Montserrat and Source Sans are fonts licensed under the SIL Open Font License version 1.1.
Mathjax is licensed under the Apache License, Version 2.0.