Conv2DTranspose: using 2D transposed convolutions with Keras
December 10, 2019 by Chris
Transposed convolutions - we looked at them in theory in a previous blog post, but how can they be applied? What are they useful for? These were questions that kept popping up every now and then.
While we all understand the usefulness of 'normal' convolutional layers, this is more difficult for transposed layers.
As a result, I've spent some time looking into applications, which results in this blog post, covering how to use 2D transposed convolutions with Keras. In this blog post, we'll first revisit the concept of transposed convolutions at a high level, to polish our understanding of these layers. Subsequently, we introduce the concept of an autoencoder, where they can be used. This understanding is subsequently transformed into an actual Keras model, with which we will try to reconstruct MNIST images that have been encoded into lower-dimensional state before.
Ready to find out how Conv2DTranspose works with Keras? Let's go! 😎
Recap: what are transposed convolutions?
Imagine that you have a ConvNet which has only one convolutional layer, performing the following operation on an image that has only one channel:
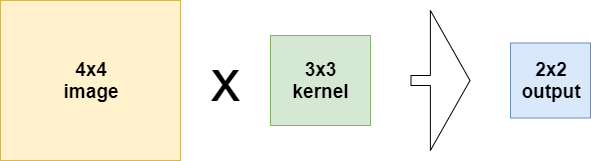
This is what a convolutional layer, being part of a convolutional neural network, does when training it.
But now you have the desire to work in the opposite direction, i.e., to use a smaller input and to learn its larger representation, being the following:
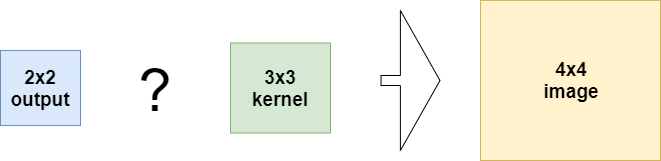
What to do?
You have multiple options, as we can see:
- It's possible to use traditional interpolation techniques like bicubic or bilinear interpolation. While they are fast, they are not too flexible: they just produce a pixel estimate given the pixel's surroundings. This might not be suitable if e.g. you have very particular data, which shares certain patterns across samples.
- You could also choose to use transposed convolutions. These convolutions, which essentially compute the matrix transpose of a regular convolutional layer, swapping the effect of the forward and the backwards pass as a result. The fun thing: the weights of these transposed convolutions are learnable, allowing - and requiring - you to learn the 'swap' from the data you're feeding it.
If you're interested in how these transposed convolutions work, I would like to recommend the post "Understanding transposed convolutions", where I cover them in more detail.
In this blog, we'll try and implement them with Keras, in order to build something that is known as an "autoencoder".
Transposed convolutions in the Keras API
Let's first take a look how Keras represents transposed convolutions, by looking at the Keras API (Keras, n.d.).
This immediately requires us to make a choice: apparently, Keras contains functionality for two-dimensional and three-dimensional transposed convolutions.
The difference? Relatively simple - it has to do with the dimensionality of your input data.
As with the Conv2D and Conv3D layers, which take either two- or three-dimensional input data (e.g., 2D pictures or 3D videos), you'll need to have two types of transposed convolutions for them in order to perform the opposite operation: Conv2DTranspose and Conv3DTranspose.
We'll leave the three-dimensional variant to another blog and cover the two-dimensional transposed convolution here, and will provide an example implementation as well.
Conv2DTranspose in the Keras API
This is how Conv2DTranspose is represented within the Keras API:
keras.layers.Conv2DTranspose(filters, kernel_size, strides=(1, 1), padding='valid', output_padding=None, data_format=None, dilation_rate=(1, 1), activation=None, use_bias=True, kernel_initializer='glorot_uniform', bias_initializer='zeros', kernel_regularizer=None, bias_regularizer=None, activity_regularizer=None, kernel_constraint=None, bias_constraint=None)
The source can be found here, and the official Keras docs here.
Let's now break it apart - we'll see that the attributes are pretty similar to the ones of the regular Conv2D layer:
- The Conv2DTranspose layer learns a number of
filters, similar to the regular Conv2D layer (remember that the transpose layer simply swaps the backwards and forward pass, keeping the rest of the operations the same!) - As the transposed convolution will also slide over the input, we must specify a
kernel_size, as with the normal convolution. - The same goes for the stride, through the
stridesattribute. - The same goes for the
paddingandoutput_paddingattributes. - Data format:
data_format, either channels first / channels last approach. - Dilation rate:
dilation_rate, if you wish to use dilated convolution. - Whether biases should be used, with
use_bias(by default set to True, and best kept there, I'd say). - The
activationfunction that must be used. - As with any layer, it's possible to specify initializers, regularizers and constraints for the kernel and bias.
And that's it - we just dissected the Conv2DTranspose layer present within the Keras API, and have seen that it's not complicated at all 😀
Using Conv2DTranspose with Keras
Now, it's time to show you how the Conv2DTranspose layer can be used with Keras.
As said, we do so by building what is known as an "autoencoder".
What is an autoencoder?
Wikipedia mentions the following about an autoencoder: "An autoencoder is a type of artificial neural network used to learn efficient data codings in an unsupervised manner."
Okay, building a neural network is likely not too difficult for the MachineCurve reader, but "[learning] efficient data codings in an unsupervised manner"? What's that?
Perhaps, we can first show this visually.
This is what an autoencoder does at a high level:

- One inputs an input image into the neural network.
- This input image is fed through the encoder part of the network, which encodes the image into some encoded state. This state is often reduced in dimensionality.
- This encoded state is fed into the decoder part of the network, which simply attempts to perform some action - in the case above, reconstructing the original input image.
While I will cover autoencoders in more detail in another series of blog posts, it's important to note that the encoder and the decoder are learnt based on your dataset. While this means that many interesting applications emerge (see the next section), your encoder and decoder will be data-specific (and useless on other data contexts) and lossy (having difficulty reconstructing the image for 100%, getting close often), requiring some training data as well (Keras Blog, n.d.).
Note that I deliberately applied a different color to the reconstructed image, to show that while the network will attempt, the reconstruction will never be fully equal to the original input.
Interesting applications of autoencoders (and hence, Conv2DTranspose)
The fact that you learn encoder and decoder functions with autoencoders, a new interesting range of appliations emerges (Keras Blog, n.d.; own experience):
- By consequence of training an encoder, you're efficiently learning a dimensionality reduction method that is highly applicable to your training set. If your neural network, e.g. your classifier, requires lower-dimensional data, it may be worthwhile to let it pass through a learned encoder function first, using the encoded state as the feature vectors for your classifier.
- Autoencoders are also used for noise reduction. Think about it as follows: when training the encoder and decoder parts, i.e. learning weights for the trainable parameters for these parts, you feed forward data - just as in the high-level supervised learning process. You compare the prediction with some 'target', compute a loss, and optimize the model in order to move the prediction closer to the 'target'. Now, when you have data (e.g. images) and add the noise you wish to filter to them, you can use autoencoders for noise reduction. By feeding forward the noisy images as input data, and setting the targets to the noise-free data, the autoencoder will essentially 'reconstruct' the image based on the noise-free data, given the noisy input data: there you have your noise reduction algorithm.
- In a strange way, you can also use autoencoders for classification. Say that you have a binary classification scenario for simple images: "yes" or "no". Picetti et al. (2018) had this scenario, in which they had so-called Ground Penetrating Radar images of landmines: contains landmine or does not contain landmine. By training the encoder and decoder on radar images without landmines, they ensured that decoding would fail when landmines were present. By subsequently measuring the differences between input and (reconstructed) output, it's possible to say whether a mine is present: if there's not too much different, no landmine is present; if there is a lot of difference, it's likely that a mine has been spotted.
Today's Conv2DTranspose model: a Conv-based autoencoder
Autoencoders can be built in many ways. For example, it's possible to use densely-connected (or, in Keras terms, Dense) layers, but this is not recommended for images (Keras Blog, n.d.).
Instead, for image-like data, a Conv-based autoencoder is more preferred - based on convolutional layers, which give you the same benefits as 'normal' ConvNets (e.g., invariance to the position of objects in an image, due to the nature of convolutions).
As we'll use the MNIST dataset for showing how Conv2DTranspose works, which contains thousands of images of handwritten digits, we'll create a simple Conv-based autoencoder today, using the Conv2DTranspose layers. Do note that I won't cover many of the autoencoder ideosyncrasies and will keep the autoencoder architecture really simple (only providing the decoder function, keeping the encoder function hidden in the model), as today's goal is not to explain autoencoders, but to give a Conv2DTranspose example instead.

What you'll need to run the model
As with many of the tutorials we post n MachineCurve, you'll need a few dependencies to run this model successfully:
- First of all, you'll need a recent version of Python - as we will write our code in this language. Please use Python 3.6 or newer.
- Additionally, you'll need the Keras deep learning framework, which we use to show Conv2DTranspose.
- The Tensorflow (or Tensorflow GPU) backend.
- You will also need Numpy for number processing.
- And don't forget Matplotlib for visualizing the inputs and the reconstructed outputs 😊
Model imports & configuration
Now, open your file explorer, navigate to some folder and create a Python file: for example, conv2dtranspose.py.
Open up your code editor as well as this file, and let's start writing some code 😀
We first add all the imports:
import keras
from keras.datasets import mnist
from keras.models import Sequential
from keras.layers import Conv2D, Conv2DTranspose
import matplotlib.pyplot as plt
import numpy as np
- We import
kerasso that we can import all the other stuff. - We import
mnistfromkeras.datasets. Easy way of importing your data! - From
keras.modelswe importSequential, which represents the Keras Sequential API for stacking all the model layers. - We use
keras.layersto importConv2D(for the encoder part) andConv2DTranspose(for the decoder part). - We import Matplotlib, specifically the Pyplot library, as
plt. - And
numpyasnp.
Subsequently, we specify some configuration options:
# Model configuration
img_width, img_height = 28, 28
batch_size = 1000
no_epochs = 25
no_classes = 10
validation_split = 0.2
verbosity = 1
The MNIST digits are 28 pixels wide and high - we hence specify img_width and img_height as 28.
We use a batch size of 1000. Even though we don't use the gradient descent optimizer (as we will see later), this represents a minibatch approach, balancing between memory requirements and accuracy of gradients (click the link for more detailed information about this trade-off).
The autoencoder will be trained for 25 epochs, and there are ten classes - the ten digits, 0 to 9. 20% of the data will be used for validation purposes and the verbosity will be set to True (1), showing all output on screen.
Example MNIST digits
Loading MNIST data & making it ready for training
We next load the MNIST data (this assumes that you'll run Keras on Tensorflow given the channels first/channels last approach):
# Load MNIST dataset
(input_train, target_train), (input_test, target_test) = mnist.load_data()
# Reshape data
input_train = input_train.reshape(input_train.shape[0], img_width, img_height, 1)
input_test = input_test.reshape(input_test.shape[0], img_width, img_height, 1)
input_shape = (img_width, img_height, 1)
# Parse numbers as floats
input_train = input_train.astype('float32')
input_test = input_test.astype('float32')
# Normalize data
input_train = input_train / 255
input_test = input_test / 255
This also includes reshaping the data into actionable format, parsing the numbers as floats (presumably speeding up the training process), and normalizing the data (which is appreciated by the optimizer).
Defining the model architecture
Next, we can define the model architecture. It looks as follows:

Our model starts with an input layer, allowing us to input the data - which is normal for any neural network.
It is then followed by three Conv2D layers, forming the 'encoder' part of our autoencoder.
The Conv2D layers are followed by three Conv2DTranspose layers, which form the 'decoder' part of our model: they upsample the encoded state back into higher-dimensional format, being the 28x28 pixel data as we had before. The last Conv2D layer finalizes this process, effectively reshaping the image into the 28x28 pixel images by convolving over the upsampled data.
In code, it looks like this:
# Create the model
model = Sequential()
model.add(Conv2D(32, kernel_size=(3, 3), activation='relu', kernel_initializer='he_normal', input_shape=input_shape))
model.add(Conv2D(16, kernel_size=(3, 3), activation='relu', kernel_initializer='he_normal'))
model.add(Conv2D(8, kernel_size=(3, 3), activation='relu', kernel_initializer='he_normal'))
model.add(Conv2DTranspose(8, kernel_size=(3,3), activation='relu', kernel_initializer='he_normal'))
model.add(Conv2DTranspose(16, kernel_size=(3,3), activation='relu', kernel_initializer='he_normal'))
model.add(Conv2DTranspose(32, kernel_size=(3,3), activation='relu', kernel_initializer='he_normal'))
model.add(Conv2D(1, kernel_size=(3, 3), activation='sigmoid', padding='same'))
This is how the Conv2DTranspose layer can be used: for the decoder part of an autoencoder.
Do note the following aspects:
- For all but the last layer, we use the
he_normalkernel initializer. We do so given the fact that we use ReLU, and that Xavier init is incompatible with this activation function. - The last layer contains 'same' padding in order to ensure that the output is 28x28 pixels.
Model compilation & fitting the data
Next, we compile the model:
# Compile and fit data
model.compile(optimizer='adam', loss='binary_crossentropy')
...using the Adam optimizer and binary crossentropy loss, which are the standard choices in today's ML toolkit 😉 The BCE loss allows the loss to increasingly go up when the predicted reconstruction is more off, while punishing almost-correct predictions only lightly. This avoids large, weird steps.
Then, we fit the data:
model.fit(input_train, input_train,
epochs=no_epochs,
batch_size=batch_size,
validation_split=validation_split)
Do note that we fit the input data as targets as well. This allows the decoder part to reconstruct the original image, as the outcome of the Conv2D-Conv2DTranspose pipeline will be compared with the original inputs being targets as well. Here, we also configure the batch_size and validation-split that we set earlier.
Reconstructing inputs with the autoencoder
model.fit starts the training process. Once the model has finished training, it is likely that you have created a reconstruction model that can reconstruct the MNIST digits quite successfully. Let's now see whether we can actually achieve this.
# Generate reconstructions
num_reconstructions = 8
samples = input_test[:num_reconstructions]
targets = target_test[:num_reconstructions]
reconstructions = model.predict(samples)
The code above, when added, takes num_reconstructions of the test data set (i.e., data the model has never seen before, to see whether it generalizes well) as well as its targets and generates reconstructions by model.predict. You can set the number of reconstructions yourself, or choose to build it in a different way - but that's up to you.
Visualizing the reconstructions
Next, we add relatively simple code for visualizing the original inputs and reconstructions:
# Plot reconstructions
for i in np.arange(0, num_reconstructions):
# Get the sample and the reconstruction
sample = samples[i][:, :, 0]
reconstruction = reconstructions[i][:, :, 0]
input_class = targets[i]
# Matplotlib preparations
fig, axes = plt.subplots(1, 2)
# Plot sample and reconstruciton
axes[0].imshow(sample)
axes[0].set_title('Original image')
axes[1].imshow(reconstruction)
axes[1].set_title('Reconstruction with Conv2DTranspose')
fig.suptitle(f'MNIST target = {input_class}')
plt.show()
This allows us to iterate over the reconstructions, to retrieve the sample and reconstruction and to prepare it for application in imshow, subsequently generating subplots and plotting the images.
Let's now see whether this was a success 😊
What the reconstructions look like
Now, open up a terminal, cd to the folder where your file is located - and run python conv2dtranspose.py. The training process should then commence and eventually finish, and plots should be generated.
Training our model yields a loss of approximately 0.05 - which is quite good, yet is unsurprising given the results often achieved with MNIST.
What's perhaps more important is to see whether it actually works - by visualizing the reconstructions. I won't keep you waiting any longer - here they are:








As you can see, using Conv2DTranspose for the decoder part worked pretty well! 😎
Summary
In this blog post, we've seen how transposed convolutions can be used with Keras - by virtue of an autocoder example. These transposed convolutions, in two dimensions available as the Conv2DTranspose layer, can be used for the 'decoder' part of such an autoencoder - allowing you to e.g. reduce dimensionality, remove noise, or reconstruct images, as we have done.
The tutorial includes a Keras based example of how to build such a model. Training the model has resulted in successful reconstructions, and a good demonstration of how Conv2DTranspose can be used with Keras.
I hope you've learnt something today! If you did, or if you didn't or have any questions - please feel free to leave a comment below. I'm looking forward to your response 😊
Thanks for reading MachineCurve today and happy engineering! 😎
References
Ramey, J. (2018, May 14). Autoencoders with Keras. Retrieved from https://ramhiser.com/post/2018-05-14-autoencoders-with-keras/
Keras Blog. (n.d.). Building Autoencoders in Keras. Retrieved from https://blog.keras.io/building-autoencoders-in-keras.html
MachineCurve. (2019, September 29). Understanding transposed convolutions. Retrieved from https://www.machinecurve.com/index.php/2019/09/29/understanding-transposed-convolutions
Keras. (n.d.). Convolutional Layers: Conv2DTranspose. Retrieved from https://keras.io/layers/convolutional/#conv2dtranspose
Wikipedia. (2006, September 4). Autoencoder. Retrieved from https://en.wikipedia.org/wiki/Autoencoder
Picetti, F., Testa, G., Lombardi, F., Bestagini, P., Lualdi, M., & Tubaro, S. (2018, July). Convolutional Autoencoder for Landmine Detection on GPR Scans. In 2018 41st International Conference on Telecommunications and Signal Processing (TSP) (pp. 1-4). IEEE.

Hi, I'm Chris!
I know a thing or two about AI and machine learning. Welcome to MachineCurve.com, where machine learning is explained in gentle terms.
Getting started
Foundation models
Learn how large language models and other foundation models are working and how you can train open source ones yourself.
Keras
Keras is a high-level API for TensorFlow. It is one of the most popular deep learning frameworks.
Machine learning theory
Read about the fundamentals of machine learning, deep learning and artificial intelligence.
Most recent articles
January 2, 2024
What is Retrieval-Augmented Generation?
December 27, 2023
In-Context Learning: what it is and how it works
December 22, 2023
CLIP: how it works, how it's trained and how to use it
Article tags
Most popular articles
February 18, 2020
How to use K-fold Cross Validation with TensorFlow 2 and Keras?
December 28, 2020
Introduction to Transformers in Machine Learning
December 27, 2021
StyleGAN, a step-by-step introduction
July 17, 2019
This Person Does Not Exist - how does it work?
October 26, 2020
Your First Machine Learning Project with TensorFlow 2.0 and Keras
Connect on social media
Connect with me on LinkedIn
To get in touch with me, please connect with me on LinkedIn. Make sure to write me a message saying hi!
Side info
The content on this website is written for educational purposes. In writing the articles, I have attempted to be as correct and precise as possible. Should you find any errors, please let me know by creating an issue or pull request in this GitHub repository.
All text on this website written by me is copyrighted and may not be used without prior permission. Creating citations using content from this website is allowed if a reference is added, including an URL reference to the referenced article.
If you have any questions or remarks, feel free to get in touch.
TensorFlow, the TensorFlow logo and any related marks are trademarks of Google Inc.
PyTorch, the PyTorch logo and any related marks are trademarks of The Linux Foundation.
Montserrat and Source Sans are fonts licensed under the SIL Open Font License version 1.1.
Mathjax is licensed under the Apache License, Version 2.0.